Spider Robots: A Web of Research
When Randolph-Macon College student Max Spivey ’21 wanted the opportunity to work one-on-one with a professor and conduct cutting-edge research, he knew just what to do. A computer science and cybersecurity major and mathematics minor, Spivey applied to RMC’s Schapiro Undergraduate Research Fellowship (SURF) program and worked under the guidance of Computer Science Professor John McManus ’84.
Six-Legged Robots
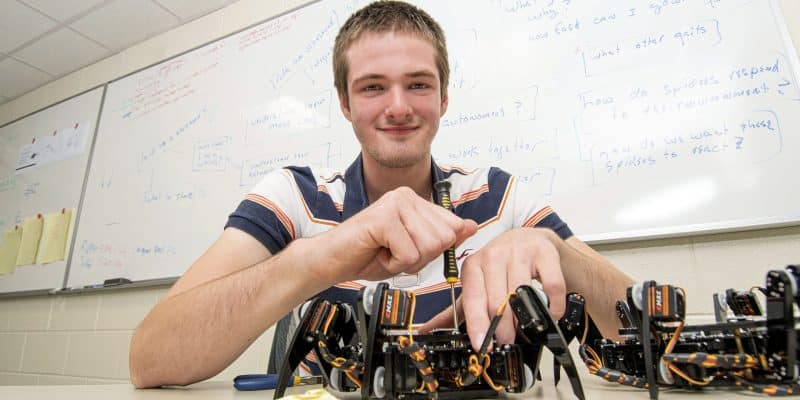
Spivey’s research, Analyzing Optimization of a Six-Legged Robot, involved developing different gaits (the way/order the legs move) and postures (looking scared, looking aggressive) for robotic spiders. In a lab in the Copley Science Center, Spivey developed a set of sensors that allowed the spiders to perceive the environment, and a set of stimulus-response behaviors for the spiders to respond to what they sense.
“In other words, I made three large, six-legged robots that responded to the world like real spiders do,” says Spivey. “For example, I programmed the robots to communicate about what obstacles to avoid—say, an object that is one meter away. I also programmed the spiders to react with specific behavior (such as twitching) in order to appear aggressive if they perceive a threat. If aggressive, the robots walked faster and/or puffed up to look bigger.”
Sensors, Coding, Behavior
The spiders were made of acrylic plastic, with micro-controller boards for the “brain,” servos (an automatic device that uses error-sensing negative feedback to correct the performance of a mechanism) and ultrasonic sensors to detect movement. Each spider, connected to a central server called a blackboard, relayed information to the blackboard, determined what to do with it, and allowed the other robots to pull the information if needed. This information included the surrounding environment and what behaviors (aggression, passivity, curiosity) the spiders displayed as they responded to their environment.
Spivey added sensors to the robots, altered code, or created new code for the robots to use. His research goals changed day by day and followed a longer-range plan that he developed for his project.
Great Ideas + Alumni Connections
The idea behind Spivey’s research came about when McManus met with Scot Tanner ’93, founder and producer of Stormcatcher Films in Petersburg, Virginia. Tanner was interested in finding students with robotics experience to design and program a robot spider that can move and interact with its surroundings.
“One of the big benefits of working at RMC is that we have highly engaged alumni and staff who help faculty make connections to support our current students,” says McManus, who later met with Pat Filoteo ’93, architect & principal project manager for Microsoft, Inc. – Windows Azure. “Pat and I talked about opportunities for him to engage with our students, and he generously offered to fund Max’s SURF project.” Spivey was known as the 2019 Filoteo Fellow.
“The equipment we used in Max’s research, including the three robot spiders, sensors, and specialized batteries, isn’t something we could cover,” says McManus. “Thanks to Pat, we were able to purchase the items Max needed to complete his research. Alumni-student connections are part of what makes RMC unique.”
The SURF Program
The SURF program was established in 1995 through a generous endowment made by Ben Schapiro ’64 and his wife, Peggy Schapiro. The Schapiros continue to support this program, which promotes scholarly undergraduate research by students in all disciplines. Ben Schapiro has served on a number of RMC committees, including the Board of Trustees and the Society of Alumni. The SURF program is co-directed by Art History Professor Evie Terrono and Chemistry Professor Serge Schreiner.